Savitzky-Golay 필터는 일차원의 데이터에 대해 이동평균을 취하는 경우와 같은 방식으로 동작하는 필터이지만, 윈도의 모든 점에 동일한 가중치를 주는 이동평균과 다르게 윈도 픽셀 값을 보간하는 다항식을 최소자승법으로 찾아서 해당 지점의 값으로 할당하는 방식을 택한다(frequency domain에서 분석하면 Savitzky-Golay 필터의 특성, 예를 들면, 피크의 위치가 잘 유지되는 점과 같은 특성을 좀 더 다양하게 볼 수 있다). 이 필터를 쓰기 위해서는 다항식의 찾수와 윈도 크기를 정해야 한다. (다항식의 찾수가 정해지면 최소 윈도 크기는 정해진다).
동일한 방식으로 이차원에 대해서도 Savitzky-Golay를 적용할 수 있다. 이 경우 다항식은 $(x, y)$의 2 변수 함수로 2차원 평면에서 정의되는 곡면으로 나타낸다. 2차원 영상의 경우도 국소 필터를 사용할 수 있지만, 필터 윈도를 영상 전체로 잡아서 전 영역을 보간하는 곡면을 찾을 수도 있다. 배경 조명이 균일하지 않는 영상의 경우 이 곡면을 이용하면 조명에 의한 효과를 예측할 수 있고, 이를 보정한 영상을 이용하면 인식에 도움을 받을 수 있다. (문자 인식에서 문서를 스캔할 때 생기는 균일하지 않은 배경이나, 2차원 바코드 인식에서 배경의 추정 등 다양한 부분에서 사용할 수 있다. 좀 더 간단하게는 배경의 변화를 균일하게 기울어진 평면으로 근사를 하여 추정할 수 있다)
3차 다항식으로 영상을 보간하는 경우: \begin{align} I(x, y)&= a_{00}\\ &+a_{10} x + a_{01} y \\ &+a_{20} x^2 + a_{11} xy + a_{02} y^2\\ &+a_{30} x^3+a_{21} x^2y+a_{12} xy^2+a_{03} y^3, \quad (x, y)\in \mbox {image} \end{align}
다항식은 $x= [a_{00}, a_{10},..., a_{03}]^T$ 의 10개의 필터 계수를 추정하면 얻어진다. 추가적으로 Savitzky-Golay을 이용하면 영상의 미분 값을 쉽게 구할 수 있다. 로컬 버전의 필터인 경우에 필터 적용 값은 윈도의 중심인 $(x, y) = (0, 0)$에서 다항식 값인 $a_{0}$이다. 이 지점에서 $x$-방향의 편미분 값은 $a_{10}$, $y$-방향의 편미분 값은 $a_{01}$로 주어진다.
필터의 계수 $x$는 최소자승법을 적용하면 얻을 수 있다. 위의 다항식에 $N(= width\times height)$개의 픽셀로 구성된 영상의 각 픽셀에서 좌표와 픽셀 값을 대입하면, $N$개의 식을 얻는다. 이를 행렬로 표현하면,
$$\bf A\cdot x = b$$
$\bf A$는 $N\times10$ 의 행렬로 각 행은 픽셀의 좌표로 구해진다:
$${\bf A} =\left[ \begin{array}{cccccccccc} 1&x_0&y_0&x_0^2&x_0y_0&y_0^2&x_0^3&x_0^2y_0&x_0y_0^2&y_0^3\\ 1&x_1&y_1&x_1^2& x_1y_1& y_1^2& x_1^3& x_1^2 y_1 & x_1 y_1^2 & y_1^3\\ 1& x_2& y_2 &x_2^2 & x_2 y_2& y_2^2 & x_2^3 & x_2^2 y_2 & x_2 y_2^2 & y_2^3 \\ &&&&\vdots \end{array} \right]$$
여기서, $i$-번째의 픽셀 위치가 $(x_i, y_i)$로 주어진 경우다. $\bf b$는 $N$-(열) 벡터로 각 픽셀 위치에서 픽셀 값을 나타내는 벡터다:
$${\bf b}=\left[\begin{array}{c} I(x_0, y_0)\\I(x_1,y_1)\\I(x_2, y_2)\\ \vdots \end{array}\right]$$
최소자승법을 적용하면, 추정된 다항식의 계수 벡터 $\bf x$는 $|\bf A\cdot x - b|^2$을 최소로 하는 벡터로,
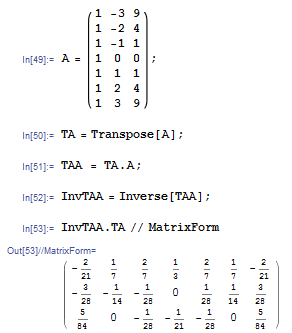
$$\bf x = (A^T \cdot A)^{-1} \cdot A^T \cdot b$$
로 주어짐을 알 수 있다. $\bf A^T \cdot A$는 $10\times 10$의 대칭 행렬로 역행렬은 쉽게 구할 수 있다.
이렇게 추정된 2차원 곡면은 영상에서 추정된 배경의 픽셀 값 분포를 의미한다. 문자인식의 예를 들면, 보통 경우에 흰 배경에 검은색 활자를 인식한다. 스캔된 영상에 검은색 활자 때문에 추정된 곡명은 일반적으로 주어진 픽셀이 만드는 곡면보다도 낮게 된다. 픽셀 값이 추정된 곡면보다 더 낮은 픽셀들은 보통 검은색 문자들을 의미하므로, 이 차이의 평균값을 구하면, 대략적으로 어떤 픽셀이 배경에 속하는지 (곡면과 차이가 평균보다 작고, 또한 픽셀 값이 곡면의 아래에 놓인 경우), 아니면 문자 영역인지(곡면과 차이가 평균보다 크고, 픽셀 값이 곡면의 아래에 놓인 경우)를 구별할 있게 된다.
이제 이 정보들을 이용해서 추정을 다시 하는데 이번에는 1차 추정에서 글씨 영역으로 분류된 픽셀을 제외하고 배경을 추정하면 좀 더 정확한 배경을 기술하는 곡면을 얻을 수 있다.
로컬 필터로 사용할 때는 1차원에서와 마찬가지로 필터 계수를 lookup table로 만들어서 사용할 수 있으나, 전 영역을 대상으로 할 때는 행렬의 크기가 매우 커져서 연산량도 많아진다.
영상:

1차 추정 배경 영상:

2차 추정 배경 영상:

'Image Recognition' 카테고리의 다른 글
| Statistical Region Merging (2) | 2012.03.25 |
|---|---|
| Local Histogram Equalization (0) | 2012.03.10 |
| webcam용 QR code detector (0) | 2012.02.19 |
| Least Squares Estimation of Perspective Transformation (4) | 2012.02.15 |
| Perspective Transformation (2) | 2012.02.14 |