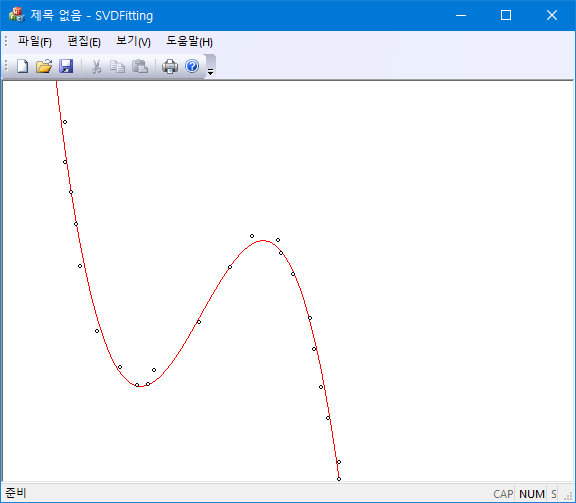
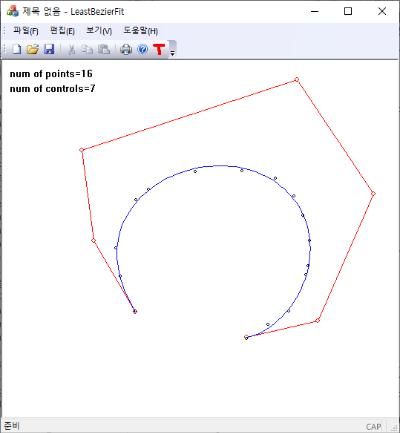
$$ \{ {\bf C}_k \} =\text{argmin}(L) \\ L = \sum_{k=0}^{N-1} \left| {\bf P}_k - \sum_{i=0}^n b_{i,n} (t_k ) {\bf C} _i \right|^2 $$
\begin{gather} t_k = d_k / d_{N-1}, \quad d_k = d_{k-1} + | {\bf P}_k -{\bf P}_{k-1}|\end{gather}
$$\text{Bernstein basis polynomial: } b_{i, n} (t)= \begin{pmatrix} n \\i \end{pmatrix} t^{i} (1-t)^{n-i} = \sum_{j=0}^n t^j M_{ji} $$
$$ M_{ji} = \frac{n!}{(n-j)!} \frac{ (-1)^{j+i}}{ i! (j-i)!} =(-1)^{j+i} M_{jj} \begin{pmatrix} j\\i \end{pmatrix} \quad (j\ge i)$$
$$ \text{note: }~M_{jj} = \begin{pmatrix} n\\j \end{pmatrix},\qquad M_{ji}=0\quad (j<i)$$
// calculate binomial coefficients using Pascal's triangle
void binomialCoeffs(int n, double** C) {
// binomial coefficients
for (int i = 0; i <= n; i++)
for (int j = 0; j <= i; j++)
if (j == 0 || j == i) C[i][j] = 1;
else C[i][j] = C[i - 1][j - 1] + C[i - 1][j];
}
void basisMatrix(int degree, std::vector<double>& M) {
const int n = degree + 1;
double **C = new double* [n];
C[0] = new double [n * n];
for (int i = 1; i < n; i++)
C[i] = C[i-1] + n;
// C[degree, k]; k=0,..,degree)
binomialCoeffs(degree, C);
// seting the diagonal;
M.resize(n * n, 0); // lower triangle;
for (int j = 0; j <= degree; j++)
M[j * n + j] = C[degree][j];
// compute the remainings;
for (int i = 0; i <= degree; i++)
for (int j = i + 1; j <= degree; j++)
M[j * n + i] = ((j + i) & 1 ? -1 : 1) * C[j][i] * M[j * n + j];
delete [] C[0]; delete [] C;
}728x90
'Computational Geometry' 카테고리의 다른 글
| Subdividing a Bezier Curve (0) | 2024.04.18 |
|---|---|
| Derivatives of Bezier Curves (1) | 2024.04.12 |
| Why Cubic Splines? (9) | 2024.03.16 |
| Natural Cubic Spline (0) | 2024.03.11 |
| Approximate Distance Between Ellipse and Point (0) | 2024.03.08 |