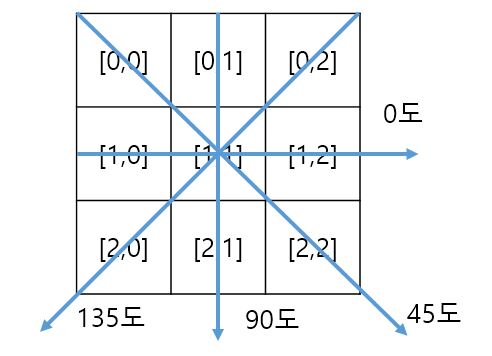
Edge를 보존하는 low-pass filter로 주어진 픽셀 값을 그 위치에서 edge 방향을 따라 구한 평균값으로 대체한다. 방향은 8방향 (45도) 기준이다. Edge의 방향은 그림처럼 중심 픽셀을 기준으로 주변의 8개를 픽셀을 이용해서 45도씩 회전하면서 차이(평균 변화율)를 계산하여 가장 작은 값을 주는 방향으로 잡는다. 중심 픽셀이 line[1][1]일 때
0도 에지: abs(line[1][0] - line[1][2])가 최소
45도 에지: abs(line[0][0] - line[2][2])가 최소
90도 에지: abs(|ine[0][1] - line[2][1])가 최소
135도 에지: abs(line[0][2] - line[2][0])가 최소
Edge 방향의 3 픽셀 평균값으로 중심 픽셀 값을 대체하면 edge는 보존하면서 mean filter를 적용한 효과를 얻을 수 있다.
void smooth_ep_3x3(BYTE *src, int width, int height, BYTE* dst) {
const int xend = width - 2, yend = height - 2;
BYTE *line[3];
line[0] = src; line[1] = line[0] + width; line[2] = line[1] + width;
BYTE *dst_line = dst + width; // starting dst row;
for (int y = 0; y < yend; ++y) {
for (int x = 0; x < xend; ++x) {
int diff1 = line[1][x] - line[1][x + 2];
if (diff1 < 0) diff1 = - diff1;
int diff2 = line[0][x] - line[2][x + 2];
if (diff2 < 0) diff2 = - diff2;
int diff3 = line[0][x + 1] - line[2][x + 1];
if (diff3 < 0) diff3 = - diff3;
int diff4 = line[0][x + 2] - line[2][x];
if (diff4 < 0) diff4 = - diff4;
if (diff1 <= diff2 && diff1 <= diff3 && diff1 <= diff4) //0-도
dst_line[x + 1] = (line[1][x] + line[1][x + 1] + line[1][x + 2]) / 3;
else if (diff2 <= diff3 && diff2 <= diff4) //45-도
dst_line[x + 1] = (line[0][x] + line[1][x + 1] + line[2][x + 2]) / 3;
else if (diff3 <= diff4) //90-도;
dst_line[x + 1] = (line[0][x + 1] + line[1][x + 1] + line[2][x + 1]) / 3;
else //135-도;
dst_line[x + 1] = (line[0][x + 2] + line[1][x + 1] + line[2][x]) / 3;
dst_line += width; //move to next dst line;
}
// increases src line ptr;
BYTE *tptr = line[2] + width;
line[0] = line[1]; line[1] = line[2]; line[2] = tptr;
}
};9번 반복 적용 결과: 지문처럼 규칙적인 패턴이 나오는 경우는 Gabor 필터를 이용하면 보다 좋은 결과를 얻을 수 있다.

iteration에 따른 correlation의 계산:
iter=0, corr w.r.t original=0.925144, corr w.r.t previous=0.925144
iter=1, corr w.r.t original=0.903661, corr w.r.t previous=0.985120
iter=2, corr w.r.t original=0.888224, corr w.r.t previous=0.994821
iter=3, corr w.r.t original=0.876582, corr w.r.t previous=0.997403
iter=4, corr w.r.t original=0.866254, corr w.r.t previous=0.998183
iter=5, corr w.r.t original=0.856620, corr w.r.t previous=0.998596
iter=6, corr w.r.t original=0.847365, corr w.r.t previous=0.998841
iter=7, corr w.r.t original=0.838400, corr w.r.t previous=0.998981
iter=8, corr w.r.t original=0.829703, corr w.r.t previous=0.999088
'Image Recognition' 카테고리의 다른 글
| Distance Transform (0) | 2021.01.16 |
|---|---|
| FFT 알고리즘의 재귀적 구현 (0) | 2021.01.14 |
| Octree Quantization (0) | 2021.01.12 |
| Median-Cut 컬러 양자화 (0) | 2021.01.12 |
| Union-Find 알고리즘을 이용한 영역분할 (0) | 2021.01.11 |



