떠있는 공+줄 부분에 작용하는 힘: 공의 무게와 줄의 무게, 그리고 바닥의 정지해 있는 줄이 뜨기 위해서는 impulsive force가 필요하다. 만약 질량 $dm$이 속도 $0\rightarrow v$로 변하면 운동량 변화가 $dp = dm(v-0)$이므로 필요한 충격력은 $f = v \frac{dm}{dt}$(위쪽)이다. 따라서 공중에 떠 있는 부분이 받는 반작용(장력) 충격력은 $-f $이다.
공의 높이가 $y$일 때 공중에 떠 있는 부분에 뉴턴의 운동방정식을 쓰면(위쪽:+)
$$ (M+ \lambda y) \frac{dv}{dt}= \sum F = -(M + \lambda y) g -f $$
운동량이 $P= (M+ \lambda y)v$이므로 운동 방정식은 다시
$$ \frac{dP}{dt} = -(M+ \lambda y ) g$$
로 쓸 수 있다. (Note: 이는 이미 공중에 있는 부분과 추가되는 $dm$ 부분을 하나의 계로 보므로 충격력은 내력이 되어서 합력에 나타나지 않는다)
$P$를 높이 $y$의 함수로 볼 수 있으므로 $\frac{dP}{dt} = \frac{dP}{dy}\frac{dy}{dt} = \frac{dP}{dy} v = \frac{P}{M + \lambda y}\frac{ dP}{dy}$
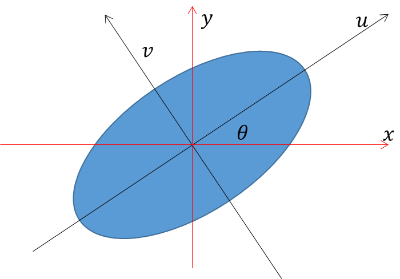
영상에 담고 있는 object을 간단히 근사를 할 때 타원으로 많이 기술한다(e.g: head tracking). 타원으로 기술하면 장축의 방향으로 object의 기울어진 방향을, 장축과 단축의 길이로 object의 크기를 가늠할 수 있다. object의 픽셀 분포에서 형상에 대한 정보는 2차 moment를 계산해서 얻을 수 있다. 이는 타원이 2차 곡선이기 때문에 가능하다. 그리고 질량중심을 원점으로 잡으면 2차 central moment를 계산해야 한다. 그런데 통계적인 의미를 부여하기 위해서는 central moment를 object의 픽셀로 나눈 normalized central moment로 구성한 covariance matrix를 사용하면 된다.
$\Sigma$는 영상에서 object pixel의 $x$ 뱡향 분산($\mu_{20}$: $x$축에 대한 회전관성), $y$ 방향 분산($\mu_{02}$: $y$축에 대한 회전관성), $x$-$y$의 correlation을 나타낸다. $\Sigma$가 대칭행렬이므로 두 개의 음이 아닌 고윳값을 가진다.
큰 고유값에 해당하는 고유벡터의 방향이 타원의 장축 방향에 해당하고 (픽셀 변동이 심하므로), 작은 고윳값의 고유벡터 방향은 단축 방향이다. 그리고 고윳값은 각각 장축과 단축의 반지름의 제곱에 비례한다($\tilde\mu_{pq}$는 단위가 거리 제곱이다). object의 orientation인 타원의 장축 방향은
보통 object을 타원 피팅할 때 윤곽선 정보를 이용하는데, 이 방법은 윤곽선을 추출할 필요가 없어서 편리하다. 단 내부에 빈 곳이 있는 object의 경우 회전관성을 감소시키므로 좋은 결과를 기대할 수 없다. 영상이 다수의 object를 담고 있을 때는 connected component labeling을 한 후 각각의 component에 대해서 fitting을 수행하면 된다.
그러나 단순진자의 진폭이 일정 이상 커져 작은 각 근사에서 벗어나면 주기는 진폭에 따라 달라짐이 잘 알려져 있다.
진자가 원호가 아닌 다른 곡선 위를 움직일 때 주기가 진폭에 무관하게 주어질 수 있는지 알아보자. 이 경우는 각보다는 용수철 진자처럼 평형점에서 움직인 거리를 이용해서 운동을 기술하는 것이 더 편리하다. 단순진자의 경우 평형점에서 잰 원호의 거리를 $s$라면 $s=L \theta$로 표현되고 작은 각 근사에서 운동 방정식은 $$ \ddot {s} =-\omega^2 s.$$
이제 진자가 움직이는 곡선에 어떤 제약이 들어오는지 살펴보자. 먼저 움직인 거리에 대한 운동 방정식은 단순조화운동식과 같아야 하므로 위의 형태는 변하지 않아야 한다. 진자가 움직이는 곡선이 $y(x)$로 표현되면 평형점($x=0$) 에서 움직인 거리($x <0$이면 움직인 거리의 음수)는
이 곡선은 반지름 $a$인 원이 $y=2a$인 수평선을 따라 구를 때, 원이 처음 $y=2a$와 접하는 점이 그리는 자취를 나타내고, $\psi$는 원의 중심과 그 점이 잇는 선분이 수직과 이루는 각이다.
Cycloid 모양을 결정하는 $a$가 정해지면 진자의 각진동수 $\omega=\sqrt{g/4a}$를 알 수 있고 주기는 $$T=\frac{2\pi}{\omega }= 4\pi \sqrt{\frac{a}{g}}$$
로 주어진다. 곡선이 주어졌으므로 처음 $y=h$에서 출발할 때 구체적으로 주기를 확인해 보자. 역학적 에너지가 보존되므로
\begin{align} E &=\frac{1}{2} m \Big( \frac{ds}{dt}\Big)^2 +\frac{1}{2} m \omega^2 s^2 \\&= \frac{1}{2} \Big( \frac{ds}{dt}\Big)^2 + mgy = mgh\\ \Longrightarrow~~ dt &= \pm \frac{ds}{\sqrt{2g(h-y)}} \end{align} 주기는 $y=h$에서 출발해서 바닥에 도달하는데 걸리는 시간의 4배이므로 \begin{align} T &= 4 \int_0^h \frac{ds}{\sqrt{2g(h-y)}} \\ &= \frac{4}{\sqrt{2g}} \int_{\pi/2}^{\psi_0} \frac{-4a d \cos (\psi/2)}{\sqrt{2a[\cos^2(\psi_0/2) - \cos^2(\psi/2)]}} \\ &=4\pi \sqrt{\frac{a}{g}}\end{align} 즉, 주기는 출발 높이에 무관하게 주기가 일정함을 알 수 있다.
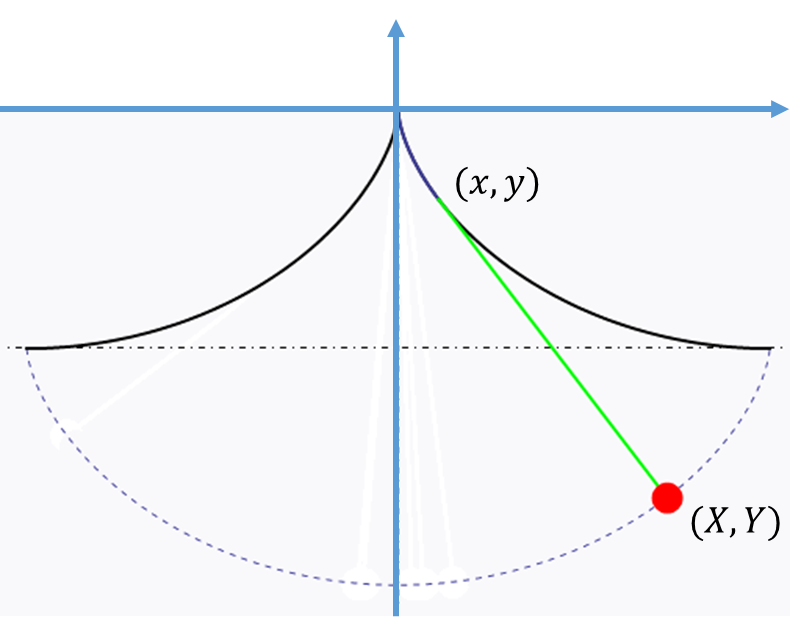
공을 cycloid 모양으로 생긴 골짜기에 굴리면 등시운동을 하지만, 그럼 등시진자는 어떻게 만들수 있을까? 이 문제도 역시 cycloid로 해결이 된다. 위에서 구한 cycloid를 y방향으로 $-2a$ 만큼 평행이동시킨 모양을 고려하자. $$ \begin{matrix} x = a (\psi - \sin \psi) \\ y = a( \cos \psi - 1)\end{matrix}$$이 식으로 표현된 cycloid 모양의 천정을 만든 후(그림의 실선), 원점(꼭대기)에 길이 $L$인 줄을 고정시키고 끝에는 무거운 추를 매단다. 추을 진동을 시키면 줄의 일부는 cycloid 모양의 천정을 따라 접하고 나머지 부분은 직선의 형태로 된다.
줄과 cycloid가 접하는 끝지점을 $(x, y)$라 할 때 접하는 부분의 줄의 길이는 $$ \ell = \int_0^\psi ds = a \int_0^\psi \sqrt{ (1-\cos \psi')^2 + (\sin \psi')^2} d\psi' = 4a [1- \cos (\psi/2)]$$로 주어진다. $(x, y)$ 이후의 줄은 접선의 방향으로 나간다. 접선의 기울기를 $\frac{dy}{dx}=\tan \phi$로 놓으면 $\phi=\psi/2 - \pi/2$이고, 직선 부분의 길이가 $L- \ell$이므로 추의 위치는 $$ \begin{matrix} X = x + (L- \ell)\cos \phi = (L - 4a) \cos \phi + a(\psi + \sin \psi) \\ Y = y+(L-\ell) \sin \phi =(L-4a)\sin \phi - a(3+ \cos \psi) \end{matrix}$$로 주어진다. 줄의 길이를 $L=4a$로 선택하면 추의 위치 $(X, Y)$도 (평행이동된) cycloid(그림의 점선) 상에서 움직임을 알 수 있다. 따라서 이렇게 만들어진 추의 주기는 등시성을 갖는다. $$ \text{추의 위치:}~~\left\{ \begin{array}{l} X= a (\psi + \sin \psi) \\ Y = -a( 3 + \cos \psi)\end{array}\right. $$
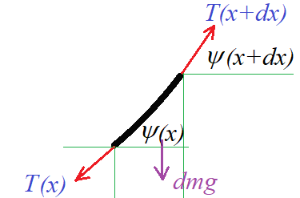
체인이나 줄을 느슨한 상태로 양끝을 고정시킬 때 모양은 포물선처럼 보이지만 실제로는 그렇지 않고 현수선(catenary)라고 불리는 곡선이다. 양끝을 고정시킨 줄을 보자.
늘어진 줄에는 자신의 무게를 지탱하기 위해서 장력이 걸린다. 그런데 중력이 수직방향으로 걸리므로 장력은 줄의 위치에 따라 달라져야 한다. 수평방향은 움직임이 없으므로 장력의 수평 성분은 모두 같아야 하는데, 줄의 가장 아래로 처진 부분의 접선방향이 수평이므로 이 지점에서 장력($T_0$)와 같아야 한다. 줄의 선밀도가 $\lambda$이고, 가장 아래 지점을 기준으로 곡선의 길이를 $s$라고 하자. 현수선의 수평 위치를 $x$, 수직 위치를 $y$로 하면 $y$는 $x$의 함수로 생각할 수 있고, 가장 아랫부분($x=0$으로 잡자)에서 잰 줄의 길이는
을 얻는 데, 원점을 이동해서 현수선의 가장 아랫부분이 ($0,a$)가 되도록 조정하면 $C=0$이 된다. 현수선은 선밀도와 꼭지점에서의 장력 비 $a$로 모양이 결정된다. 이 값은 한 지점에서 꼭짓점까지 수평거리($x$)와 기울기를 측정하면 결정할 수 있다: 특징 1번. 그리고 $|x| \ll a$일 때