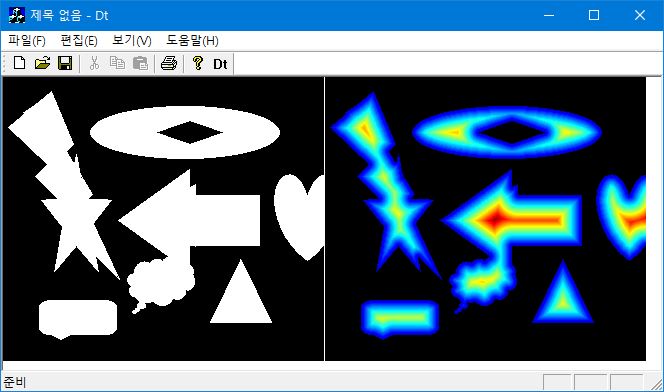
각 전경 픽셀에 대해서 모든 배경 픽셀까지 거리를 구한 다음 최솟값을 할당하면 된다. 픽셀 수가 n = w * h 개면 time complexity는 O(n^2)이다 (이미지 폭이나 높이의 4승이므로 연산량이 상당하다.) linear time Euclidean distance transform은 kipl.tistory.com/268.
ListPlot3D[ Reverse@ImageData[pic], PlotRange -> Full]
int brute_force_edt(double *img, int w, int h) {
int *list = new int [w * h];
int fg_cnt = 0;
int bg_ptr = w * h; //배경 픽셀 위치는 끝에서 역으로 채움;
//전경과 배경 픽셀 위치를 분리;
for (int i = w * h; i-->0;)
if (img[i]) list[fg_cnt++] = i; // foreground;
else list[--bg_ptr] = i; // background;
for (int i = 0; i < fg_cnt; ++i) { // 전경 픽셀;
int xi = list[i] % w, yi = list[i] / w;
int d2min = INT_MAX;
for (int j = w * h; j--> fg_cnt;) { // 배경 픽셀까지 거리를 계산해서 최소값을 할당;
// 배경이 list에 역순으로 저장되으로 역방향 서치;
int dx = (list[j] % w) - xi, dy = (list[j] / w) - yi;
int dst = dx * dx + dy * dy;
if (dst == 1) {
d2min = 1; break;
}
if (d2min > dst) d2min = dst;
}
img[list[i]] = d2min;
}
delete [] list;
return fg_cnt;
}728x90
'Image Recognition > Fundamental' 카테고리의 다른 글
| Interpolation Kernels (0) | 2021.05.05 |
|---|---|
| Fowler Angle (0) | 2021.04.05 |
| 이미지에 Poisson Noise 넣기 (0) | 2021.03.06 |
| Grassfire Algorithm (0) | 2021.03.05 |
| Image Sharpness (0) | 2021.02.25 |