평면에서 주어진 벡터장의 orientation을 찾는 문제는 영상처리 알고리즘에서 자주 접하게 된다. 벡터의 방향은 두 성분의 부호와 상대적인 크기에 따라 달라지지만, 기준선에 대해 상대적으로 기울어진 정도를 나타내는 orientation은 정반대 방향의 두 벡터 $(v_x, v_y)$와 $(-v_x, -v_y)$에 같은 값이 부여되고, 그 값은 벡터의 $x$ 성분과 $y$ 성분의 비의 arctangent 값
$$\theta=\tan^{-1} \left( \frac {v_y}{ v_x }\right)$$
로 계산할 수 있다.
영상처리에서는 영상에 내재하는 잡음에 의한 영향을 줄이기 위해 한 지점에서 orientation을 추정할 때 보통 그 지점 주변의 벡터 성분의 평균을 이용한다. 주변에서 정반대 방향의 두 벡터가 있는 경우 이 두 벡터는 기하학적으로 같은 orientation을 주지만 더하는 경우 서로 상쇄되어 평균에는 기여가 없으므로 위 식을 사용하면 잘못된 예측을 줄 수 있다. 따라서 잡음을 고려한 상황에서 좀 더 robust 하게 orientation을 추정할 수 있는 방법이 있어야 한다. 벡터 성분의 상대적인 부호만 고려하는 식으로 바꾸기 위해서 $\tan \theta$ 대신에 $\tan (2\theta)$를 고려하자.
\[ \tan (2\theta) = \frac {2\tan(\theta)}{1-\tan^2(\theta)}=\frac {2v_x v_y}{v_x^2 - v_y^2}. \]
분모에서는 각 성분의 제곱, 분자는 두 성분의 곱으로 표현되므로 성분 사이의 상대부호가 같은 경우에는 우측식은 같은 값을 주므로 분모, 분자를 주변 평균값 $v_x v_y ~\longrightarrow ~<v_x v_y>$, $v_x^2 - v_y^2 ~\longrightarrow ~<v_x^2> - < v_y^2>$으로 대체하여도 올바른 orientation을 주게 된다. orientation 각도는
\[ \theta = \frac {1}{2} \tan^{-1}\left( \frac {2 <v_x v_y>}{ <v_x^2> - <v_y^2>} \right) \]
으로 주어진다. 실제 계산은 인자가 singular해지는 경우를 피하기 위해서 $\text {atan2}()$ 함수를 사용한다.
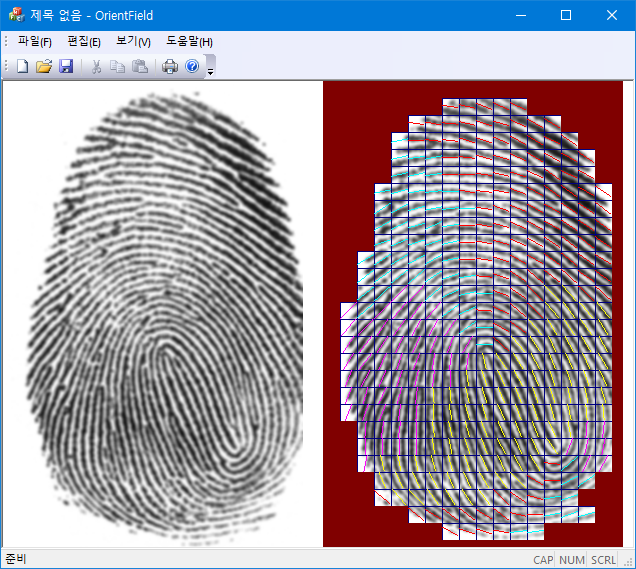
Local Ridge Orientation
지문에서 ridge의 방향(orientation)은 gradient에 수직한 방향이다(그런데 벡터인 gradient와는 달리 ridge의 방향은 모호함이 있다. 시계방향 또는 반시계방향으로 90도 회전이 모두 동일한 ridge의 방향이
kipl.tistory.com
Ellipse Parameters
원뿔을 평면으로 잘랐을 때 나타나는 곡선인 conic section은 직교 좌표계에서 $(x, y)$에 대한 2차 형식으로 쓰인다. 이 conic section이 타원을 기술할 때 parameter {$a, b, c, d, e, f$}를 이용해서 타원의..
kipl.tistory.com
Object Orientation
영상에서 전경 물체가 어떤 방향으로 정렬이 되어있는가를 찾는 문제는 다양한 영상 인식 알고리즘에서 나타난다. 예를 들면, 영상에서 사람의 머리가 어떤 자세를 취하고 있는가를 묻는 것에
kipl.tistory.com
'Image Recognition > Fundamental' 카테고리의 다른 글
| Best-fit Ellipse (0) | 2022.01.16 |
|---|---|
| Image Moments (0) | 2021.12.04 |
| Poisson Image Editing (0) | 2021.08.03 |
| Sampling Theorem (0) | 2021.05.12 |
| Lanczos Resampling (0) | 2021.05.08 |