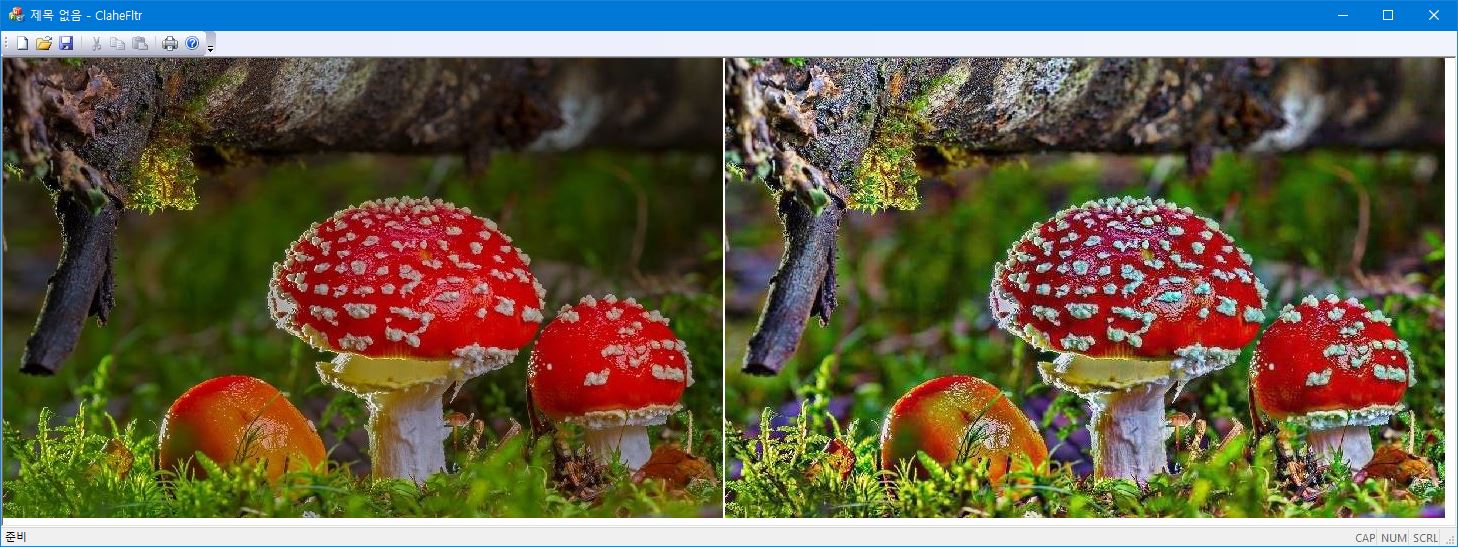
Contrast Limited Adaptive Histogram Equalization (CLAHE). CLAHE는 영상의 평탄화 (histogram equalization) 과정에서 contrast가 과도하게 증폭이 되는 것을 방지하도록 설계된 adaptive algorithm의 일종이다. CLAHE algorithm은 전체 영상 영역을 바로 적용하지 않고 tile이라 불리는 작은 영역으로 영상을 분할하여 tile 별로 적용한다. 그리고 인접하는 tile 간에 bilinear 보간을 사용함으로써 tile 경계에서 급격한 변화가 생기는 것을 방지한다. gray 영상에 CLAHE 알고리즘을 적용하면 영상의 contrast을 개선해 준다. 그리고 컬러 영상에도 적용을 할 수 있는데, 보통 luminance 채널에만 적용한 결과(HSV로 변환 후 V에 대해서만 적용)가 RGB 각 채널별로 적용하는 것보다 좋은 결과를 준다.
아래는 RGB 영상의 각 채널에 CLAHE 알고리즘을 적용한 결과이다.
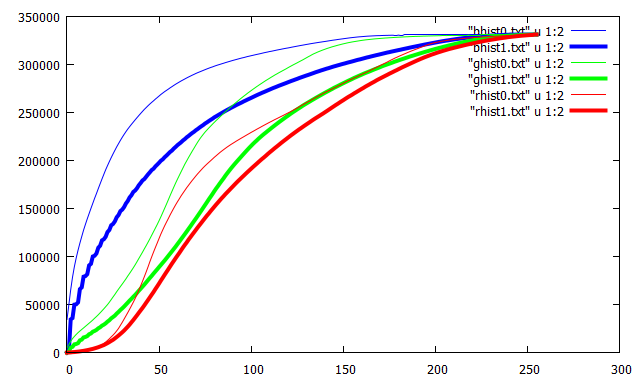
cumulative histogram의 변화
rgn: 히스토그램을 구하는 이미지 상의 영역;
tile: adaptive HE가 적용되는 영역
첫 행/열 tile의 폭/높이 = rgn 폭/높이의 절반
마지막 tile 크기 = 이미지의 나머지 폭/높이
cliplimit = 각 영역의 히스토그램 슬롯당 들어가는 최대 픽셀 수
/* "Graphics Gems IV" 의 code를 수정함;
** 2023-01-13 updated: 이미지 사이즈가 rgn 사이즈의 정수배가 되지 않을 때 문제 해결;*/
int CLAHE ( BYTE* image, int width, int height,
BYTE gMin/*0*/, BYTE gMax/*255*/, int rgn_nx/*16*/, int rgn_ny/*16*/,
int bins/*256*/, double fcliplimit )
{
std::vector<int> map_array(rgn_nx * rgn_ny * bins);
int rgn_xsz = width / rgn_nx;
int rgn_ysz = height / rgn_ny;
int rgn_area = rgn_xsz * rgn_ysz;
int clipLimit = int( fcliplimit * ( rgn_xsz * rgn_ysz ) / bins );
clipLimit = ( clipLimit < 1 ) ? 1 : clipLimit;
//
/* calculate greylevel mappings for each contextual region */
for (int iy = 0; iy < rgn_ny; iy++) {
for (int ix = 0; ix < rgn_nx; ix++) {
int *hist = &map_array[bins * ( iy * rgn_nx + ix )];
int start = (iy * rgn_ysz) * width + ix * rgn_xsz;
RgnHistogram (&image[start], width, rgn_xsz, rgn_ysz, hist, bins);
ClipHistogram ( hist, bins, clipLimit );
//convert hist to cuimulative histogram normalized to [gMin=0, gMax=255]
MapHistogram ( hist, gMin, gMax, bins, rgn_area );
}
}
/* bilinearInterp greylevel mappings to get CLAHE image */
/* 첫열/행에 해당하는 타일은 rgn의 절반 크기만 처리하므로 ix(iy)는 0~rgn_nx(rgn_ny)까지임*/
int szx, szy, ixl, ixr, iyt, iyb;
BYTE *first_tile = &image[0]; // 같은 iy를 갖는 첫 타일의 주소;
for (int iy = 0; iy <= rgn_ny; iy++ ) {
if ( iy == 0 ) {
// 첫 타일은 절반만;
szy = rgn_ysz / 2; iyt = iyb = 0;
} else if ( iy == rgn_ny ) {
// 마지막 타일은 나머지 전부;
szy = height - ((rgn_ny-1)*rgn_ysz + rgn_ysz/2);
iyt = rgn_ny - 1; iyb = iyt;
} else {
szy = rgn_ysz; iyt = iy - 1; iyb = iyt + 1;
}
BYTE *ptile = &first_tile[0]; //각 타일의 시작 주소;
for (int ix = 0; ix <= rgn_nx; ix++ ) {
if ( ix == 0 ) {
//첫 타일은 절반만;
szx = rgn_xsz / 2; ixl = ixr = 0;
} else if ( ix == rgn_nx ) {
//마지막 타일은 나머지 전부;
szx = width - ((rgn_nx-1)*rgn_xsz + rgn_xsz/2);
ixl = rgn_nx - 1; ixr = ixl;
} else {
szx = rgn_xsz; ixl = ix - 1; ixr = ixl + 1;
}
// cumulative histogram data;
int *LU = &map_array[bins * ( iyt * rgn_nx + ixl )];
int *RU = &map_array[bins * ( iyt * rgn_nx + ixr )];
int *LB = &map_array[bins * ( iyb * rgn_nx + ixl )];
int *RB = &map_array[bins * ( iyb * rgn_nx + ixr )];
BilinearInterp (ptile, width, LU, RU, LB, RB, szx, szy );
ptile += szx;
}
first_tile += szy * width;
}
return 0;
}
void ClipHistogram ( int* hist, int gLevels, int clipLimit ) {
int excess = 0;
for (int i = 0; i < gLevels; i++ ) { /* calculate total number of excess pixels */
int diff = hist[i] - clipLimit;
if ( diff > 0 ) excess += diff; /* excess in current bin */
};
/* clip histogram and redistribute excess pixels in each bin */
int incr = excess / gLevels; /* average binincrement */
int upper = clipLimit - incr; /* bins larger than upper set to cliplimit */
for (int i = 0; i < gLevels; i++ ) {
if ( hist[i] > clipLimit ) hist[i] = clipLimit; /* clip bin */
else {
if ( hist[i] > upper ) { /* high bin count */
excess -= hist[i] - upper;
hist[i] = clipLimit;
} else { /* low bin count */
excess -= incr;
hist[i] += incr;
}
}
}
while ( excess ) { /* redistribute remaining excess */
int start = 0;
while ( excess && start < gLevels) {
int step = gLevels / excess;
if ( step < 1 ) step = 1; /* step size at least 1 */
for (int i = start; i < gLevels && excess; i += step)
if (hist[i] < clipLimit) {
hist[i]++; excess--;
}
start++;
}
}
}
void BilinearInterp ( BYTE * image, int stride,
int* LU, int* RU, int* LB, int* RB,
int rgn_xsz, int rgn_ysz ) {
int area = rgn_xsz * rgn_ysz; /* Normalization factor */
for (int y = 0, yrev = rgn_ysz; y < rgn_ysz; y++, yrev--) {
BYTE *line = &image[y * stride];
for (int x = 0, xrev = rgn_xsz; x < rgn_xsz; x++, xrev-- ) {
int v = line[x]; /* get histogram bin value */
v = (yrev * ( xrev * LU[v] + x * RU[v] ) + y * ( xrev * LB[v] + x * RB[v] ) ) / area;
line[x] = v > 255 ? 0xFF: v < 0 ? 0x00: v;
}
//image += stride - rgn_xsz; // goto the beginning of rgn's next-line;
}
}
void RgnHistogram ( BYTE* image, int stride, int rgn_xsz, int rgn_ysz,
int* hist, int gLevels) {
// image is pointing the beginnign of a given region;
for (int i = 0; i < gLevels; i++ ) hist[i] = 0;
for (int y = 0; y < rgn_ysz; y++ ) {
BYTE *line = &image[y * stride];
for (int x = 0; x < rgn_xsz; x++)
hist[line[x]]++;
}
}
// transform hist[] to a normalized cumulative histogram;
void MapHistogram ( int* hist, BYTE gMin, BYTE gMax, int gLevels, int rgn_area ){
double scale = double( gMax - gMin ) / rgn_area;
int iMin = int(gMin);
for (int i = 0, sum = 0; i < gLevels; i++ ) {
sum += hist[i];
int a = int(iMin + sum * scale );
hist[i] = a > gMax ? gMax: a < gMin ? gMin: a;
}
}
n이 양수일 때 n 과 n-1은 짝홀/홀짝의 짝이므로 2의 파워가 아니면 이진수로 표현할 때 한 곳에서 비트 차이가 난다. 따라서 AND연산을 하면 0이 아니다. 그런데 n이 2의 파워이면 최상위 비트만 1이고, n-1은 n의 최상위 비트를 제외한 하위비트 모두가 1로 구성되므로 AND 연산을 하면 0이다.
int NextPowerOf2(int n) { //32-bit;
n--;
n |= n >> 1;
n |= n >> 2;
n |= n >> 4;
n |= n >> 8;
n |= n >> 16;
n++;
return n;
} // NextPowerOf2(5) -> 8; NextPowerOf2(8) -> 8;
이미지 처리 과정에서 미분에 해당하는 그래디언트 필드(gradient field: $g_x$, $g_y$ )를 이용하면 이미지 상의 특징인 corner, edge, ridge 등의 정보를 쉽게 얻을 수 있다. 이미지의 한 지점이 이러한 특징을 가지는 특징점이 되기 위해서는 그래디언트 필드의 값이 그 점 주변에서 (3x3나 5x5정도 크기의 window) 일정한 패턴을 유지해야 한다. 이 패턴을 찾기 위해서 그래디언트 필드에 PCA를 적용해보자. 수평과 수직방향의 그래디언트 field인 $g_x$와 $g_y$ 사이의 covariance 행렬은 다음 식으로 정의된다:
$<...> = \int_{W}(...) dxdy$는 픽셀 윈도에 대한 적분을 의미한다. $\Sigma$의 eigenvalue는 항상 음이 아닌 값을 갖게 되는데 (matrix 자체가 positive semi-definitive), 두 eigenvalue이 $λ_1$, $λ_2$면
을 만족한다 (완전히 상수 이미지를 배제하면 0인 경우는 없다). eigenvalue $λ_1$, $λ_2$는 principal axis 방향으로 그래디언트 필드의 변동(분산)의 크기를 의미한다. edge나 ridge의 경우는 그 점 주변에서 잘 정의된 방향성을 가져야 하고, corner의 경우는 방향성이 없어야 한다. edge나 ridge처럼 일방향성의 그래디언트 특성을 갖거나 corner처럼 방향성이 없는 특성을 서로 구별할 수 있는 measure가 필요한데, $λ_1$과 $λ_2$를 이용하면 차원이 없는 measure을 만들 수 있다. 가장 간단한 차원이 없는 측도(dimensionless measure)는 eigenvalue의 기하평균과 산술평균의 비를 비교하는 것이다.
$$P = 1-Q = \frac{(s_{xx}-s_{yy})^2 + 4 s_{xy}^2}{(s_{xx}+s_{yy})^2};$$를 정의할 수 있는 데 $0 \le P \le 1$이다. $Q$와 $P$의 의미는 무엇인가? 자세히 증명을 할 수 있지만 간단히 살펴보면 한 지점에서 $Q \rightarrow 1$이려면 $λ_{1} \approx λ_{2}$이어야 하고, 이는 두 주축이 동등하다는 의미이므로 그 점에서는 방향성이 없는 코너의 특성을 갖게 된다. 반대로 $Q \rightarrow 0$이면 강한 방향성을 갖게 되어서 edge(ridge) 특성을 갖게 된다.
실제적인 응용으로는 지문 인식에서 지문 영역을 알아내거나 (이 경우는 상당이 큰 윈도를 사용해야 한다) 또는 이미지 텍스쳐 특성을 파악하기 위해서는 이미지를 작은 블록으로 나누고 그 블록 내의 미분 연산자의 균일성을 파악할 필요가 있는데 이 차원이 없는 측도는 이미지의 상태에 상관없이 좋은 기준을 주게 된다.
참고 논문:
Image field categorization and edge/corner detection from gradient covariance Ando, S. Pattern Analysis and Machine Intelligence, IEEE Transactions on Volume 22, Issue 2, Feb 2000 Page(s):179 - 190