표준형 타원
$$ \frac{x^2}{a^2} + \frac{y^2}{b^2} = 1$$
의 두 주축에 대한 central moment (moment of inertia)는 각각
$$ \mu_{20} = \frac{\pi}{4} a^3 b, \quad \mu_{02} = \frac{\pi}{4} ab^3$$
으로 주어짐은 쉽게 계산할 수 있다. 그런데 타원의 면적인 0차 central moment가 $\mu_{00}= \pi ab$이므로 normalized central moment (위치의 분산을 의미한다)는 각각
$$\tilde\mu_{20} = \frac{\mu_{20}}{\mu_{00}} = \frac{1}{4}a^2, \quad \tilde\mu_{02} = \frac{\mu_{02}}{\mu_{00}} = \frac{1}{4}b^2$$
따라서 장축과 단축의 반지름은 주축에 대한 2차 normalized central moment을 구하면 얻을 수 있다.
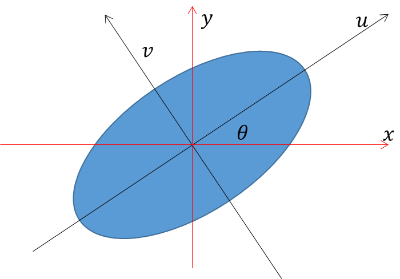
기울어진 타원의 경우는 $\tilde\mu_{pq}$가 픽셀의 분포를 알려주므로 이를 이용한 covariance 행렬의 고유값을 구하면 장축과 단축의 반지름을 알 수 있고, 기울어진 정도도 알 수 있다. 공변행렬
$$ \Sigma = \left( \begin{array}{cc} \tilde\mu_{20} & \tilde\mu_{11} \\ \tilde\mu_{11} & \tilde\mu_{02} \end{array} \right)$$
의 두 고윳값은
$$ \lambda_1 = \frac{1}{2}\left( \tilde\mu_{20}+ \tilde\mu_{02} + \sqrt{ (\tilde\mu_{20} - \tilde\mu_{02})^2 + 4 \tilde\mu_{11}^2} \right),$$
$$ \lambda_2 = \frac{1}{2}\left( \tilde\mu_{20}+ \tilde\mu_{02} - \sqrt{ (\tilde\mu_{20} - \tilde\mu_{02})^2 + 4 \tilde\mu_{11}^2} \right).$$
따라서 기울어진 타원의 장축과 단축의 반지름, 그리고 회전각은
$$ a = 2\sqrt{ \lambda_1}, \quad b = 2\sqrt{ \lambda_2}, \quad \tan(2\theta)=\frac{2 \tilde\mu_{11}}{ \tilde\mu_{20}-\tilde\mu_{02} }$$
로 주어지므로 회전된 좌표계 $(u, v)$에서 타원의 방정식은
$$ \frac{ u^2 }{4 \lambda_1} + \frac{v^2 }{4\lambda_2} = 1$$
로 쓰인다.
다시 원 좌표계 $(x, y)$로 돌아가기 위해서 (물론 질량중심이 원점인 좌표계이다)
$$ u = \cos \theta x+ \sin \theta y, \quad v = -\sin \theta x + \cos \theta y$$
를 대입하면 타원을 2차식 형태
$$ A x^2 + 2B xy + C y^2 = 1$$
로 쓸 수 있는데, 그 계수는
$$ A= \frac{1}{8}\left( \frac{1}{\lambda_1} + \frac{1}{\lambda_2} +\Big( \frac{1}{\lambda_1} - \frac{1}{\lambda_2} \Big) \cos (2\theta) \right)=\frac{\tilde\mu_{02}}{ 4(\tilde\mu_{20}\tilde\mu_{02}-\tilde\mu_{11}^2 )} $$
$$ C= \frac{1}{8}\left( \frac{1}{\lambda_1} + \frac{1}{\lambda_2} -\Big( \frac{1}{\lambda_1} - \frac{1}{\lambda_2} \Big) \cos (2\theta) \right)=\frac{\tilde\mu_{20}}{ 4(\tilde\mu_{20}\tilde\mu_{02}-\tilde\mu_{11}^2 )} $$
$$ B= \frac{1}{8}\left( \frac{1}{\lambda_1} - \frac{1}{\lambda_2} \right)\sin (2\theta)=\frac{-\tilde\mu_{11}}{ 4(\tilde\mu_{20}\tilde\mu_{02}-\tilde\mu_{11}^2 )} $$
로 주어진다. 주어진 object의 normalized central moment를 구하면 타원 fitting에 대한 정보를 구할 수 있음을 보였다.

'Image Recognition > Fundamental' 카테고리의 다른 글
| Least Squares Fitting of Ellipses (0) | 2022.01.27 |
|---|---|
| Circle Fitting: Pratt (0) | 2022.01.20 |
| Best-fit Ellipse (0) | 2022.01.16 |
| Image Moments (0) | 2021.12.04 |
| Orientation 추정 (0) | 2021.11.30 |





