볼링공(반지름: $R$, 회전관성: $\frac{2}{5} mR^2$)이 굴러가다가 턱에 부딪치는 경우를 보자. 충돌이 비탄성적이라면 공은 턱(높이: $h$)을 기준으로 회전해서 턱 위로 올라갈 수 있다. 물론 부딪치기 직전 속도가 너무 작으면 오를 수 없고, 너무 크면 위로 튄다. 어떤 조건일 때 튀지 않고 턱 위로 올라갈 수 있을까?
1. 충돌 전후로 턱에 대한 각운동량이 보존되므로 충돌 직후 각속도 $\omega$는 충돌 전 속도($v$)를 알면 구할 수 있다.
2. 역학적 에너지 보존을 이용하면 공이 턱에 완전히 올라서기 위해서는 충돌 직후 각속도 $\omega$가 일정한 크기 이상이어야 한다:
$$ \omega \ge \sqrt{\frac{10gh}{7R^2}}.$$
3. 충돌 후에는 공의 질량중심은 턱에 대해서 회전을 한다. 이때 구심력 역학을 하는 힘은 턱이 주는 수직항력($F_N$)과 이 수직항력 방향의 중력 성분($mg \cos \theta$)의 차이이다. 너무 빨리 회전하면 공이 턱에 붙어서 돌지 못하고 튕길 수 있다. 튀지 않고 회전하려면 어떤 조건이 들어오는가? 충돌 직후의 운동방정식이
$$mg \cos \theta -F_N = mR \omega^2$$
이므로 공이 튀지 않고, 즉 턱과 접촉을 유지하면서($F_N \ge 0$) 올라가기 위해서는 턱의 높이가
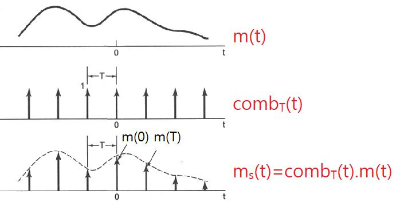
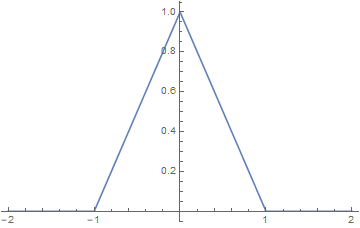
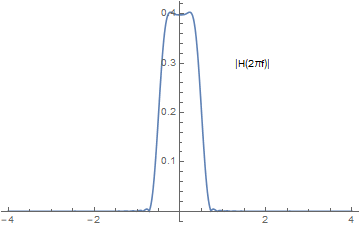
따라서 message의 spectrum이 band-limited이고, $\text{band-width} \le \frac{1}{2} f_s = \frac{1}{2T}$인 조건을 만족하면 샘플링된 데이터를 이용해서 원 신호를 복원할 수 있다.
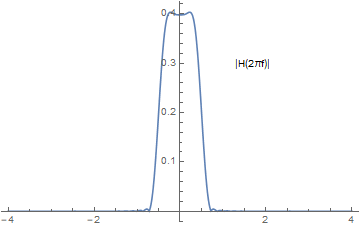
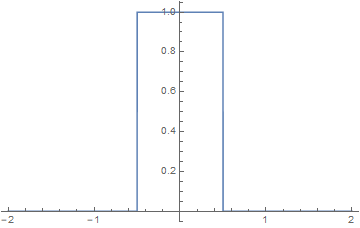
이 경우에 low-pass filter
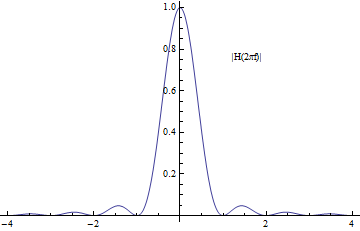
$$ H(f/f_s) := T \cdot \text{rect}(f/f_s)=\left\{ \begin{array}{ll} T ,& |f/f_s| < 1/2 \\ 0 , & |f/f_s| >1/2,\end{array}\right. $$
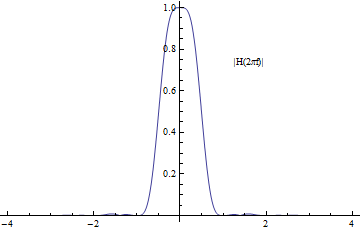
을 sampled massage의 Fourier transform에 곱해주면, 원 message의 Fourier transform을 얻는다:
$$ M(f) = H(f) M_s(f).$$
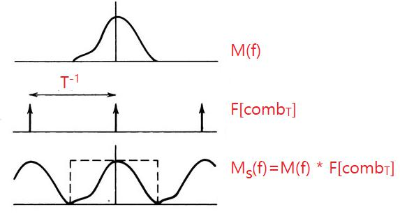
그런데 $M_s(f)$는 frequency domain에서 주기가 $f_s = 1/T$인 주기함수이므로 Fourier series로 표현할 수 있다:($\text{comb}_T$ 함수와 같은 방식으로 하면 계수를 쉽게 찾을 수 있다: Poisson summation formula)
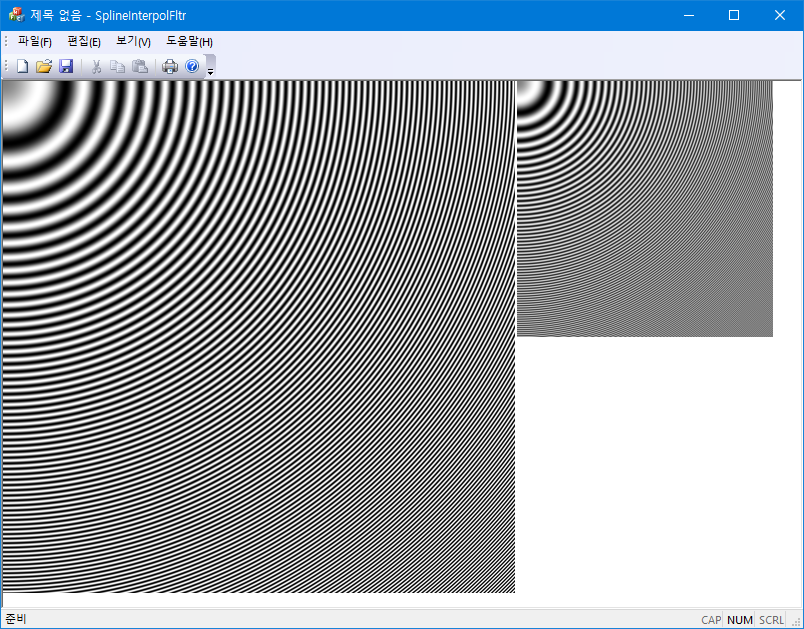
Interpolation 함수는 영상의 resampling 과정에서 사용할 수 있다. 주어진 이미지를 확대하거나 축소하려면 기존 이미지의 픽셀과 픽셀 사이 구간에서 픽셀 값을 알아내야 하는데, 이때 interpolation 함수를 이용하여 필요한 데이터를 얻는 과정인 resampling 한다.
다음 코드는 Lanczos3 kernel을 사용해서 이미지를 확대하거나 축소할 때 행에 대해서 필요한 resampling을 수행한다. 여기서는 kernel의 중심이 소스 이미지의 픽셀과 픽셀의 가운데에 놓이도록 설정하였다($-0.5$의 의미). 이는 작은 영상을 크게 확대할 때 가장자리에서 왜곡이 되는 것을 방지하기 위해서 인데 큰 영상을 확대/축소할 때는 영향이 없다. 이 interpolation은 separable이므로 2차원의 경우 행방향으로 진행한 후 그 결과를 다시 열 방향으로 진행하는 2-pass 방식으로 사용해도 된다.
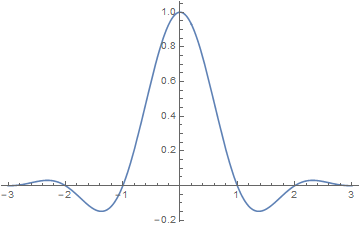
// windowed sinc(x); window=sinc(x/3);
static double Lanczos3(double x){
if (x < 0) x = -x; // symmetric;
x *= PI;
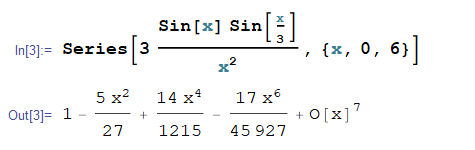
if (x < 0.01) return 1. + (- 5./ 27. +
(14. / 1215. - 17. * x * x / 45927.) * x * x) * x * x;
else if (x < 3.) return 3. * sin(x) * sin(x / 3.) / x / x;
else return 0;
};
// interpolation in the horizonal direction: single channel or gray image;
// x = pixel position in a destination image;
double Lanczos3_line(BYTE *src_line, int srcWidth, int x, double xscale) {
double halfWidth;
if (xscale > 1.) halfWidth = 3.;
else halfWidth = 3. / xscale;
double centerx = double(x) / xscale - 0.5; //center loc of filter in the src_line;
int left = (int)floor(centerx - halfWidth);
int right = (int)ceil(centerx + halfWidth);
if (xscale > 1) xscale = 1;
double s = 0;
double weightSum = 0;
for (int ix = left; ix <= right; ix++) {
double weight = Lanczos3((centerx - ix) * xscale);
int xx = ix; // for ix<0 || ix>=srcWidth: repeat boundary pixels
xx = min(max(xx, 0), srcWidth - 1));
s += weight * src_line[xx];
weightSum += weight;
}
return s / weightSum;
}
Interpolation은 이산적으로 주어진 샘플들 사이에서 존재하지 않는 값을 추정하는 작업이다. 한 지점에서 interpolation을 통해 값을 추정하기 위해서는 주변의 알려진 샘플 값들을 참조해야 하고 적절한 가중치를 주어야 한다. 또한 interpolation 함수는 충분히 부드럽게 주변 샘플 값들과 연결이 되어야 한다. 이런 관점에서 보면 interpolation은 주변 샘플에 적절한 가중치를 주는 kernel 함수와 convolution으로 이해할 수 있고, 또한 샘플링 과정에서 잃어버린 정보를 샘플 데이터를 smoothing해서 복원하는 과정으로 해석할 수 있다.
kernel 함수가 $K(x)$고, 일정한 간격으로 주어진 1차원 샘플의 값이 $\{ (x_k, c_k)\}$일 때 interpolation 함수는
$$ f(x) =\sum_k c_k K \Big( \frac{x - x_k}{h}\Big)$$
의 형태로 표현할 수 있다. $h$는 샘플의 간격으로 이미지에서는 픽셀의 간격이므로 $h=1$이다.
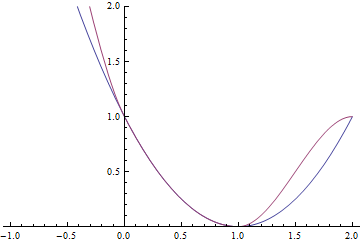
일반적인 cubic convolution kernel은 4개의 샘플데이터를 이용해 보간하므로 폭이 4(반지름 =2)이다. $x_k=-1,0,1,2$에서 4개의 샘플값 $c_0, c_1, c_2,c_3$이 주어진 경우, $0\le x <1$구간에서 cubic interpolation은 kernel의 중심을 원점에서 $x$로 평행이동하면,
실용적인 파라미터의 범위는 $[-3,0]$이고( $a<-3$이면 $|x|<1$ 구간에서 단조감소가 아니어서 0이 아닌 곳에서 1보다 큰 값을 갖게 된다), 보통 많이 사용하는 cubic interpolation은 $a=-0.5$에 해당한다. 일반적으로 $a$가 -3에 가까워지면 최소 위치가 더 깊어지므로 일종의 미분 연산자처럼 작용하게 되어 이미지에 적용할 때 sharpness가 증가하게 된다. $a$가 0에 가까워지면 최소 위치 깊이가 0에 가까워지므로 gaussian filter처럼 이미지를 blurring하는 효과가 발생한다.