이 문제의 차원을 가지는 물리량은 중력상수, 선밀도, 거리 $a$이므로 중력은 이들의 조합으로 써질 것이다.
$$F \propto G^\delta \rho^\beta a^\gamma $$
양변의 차원이 갖아야 하므로 $\delta =1$, $\beta=2$, $\gamma=0$임을 알 수 있다. 따라서 떨어진 거리 $a$에 무관하다. 물론 $\alpha=0$인 경우는 발산하다. $\alpha$에 대한 의존도는 $\alpha$ 자체가 차원이 없으므로 차원해석으로 구할 수 없고, 직접 적분을 해야하는데 그 결과는 \[ F= \frac{2\pi G \rho^2}{\sin \alpha} \]
두 번째 질문: 막대의 길이$=L$이 충분히 길지만 $(L \gg a)$ 유한하다면 힘은 무한히 긴 경우에서 약간 벗어난 형태로 표현될 것이다. 벗어난 정도는 어떤 식으로 표현될까?
힌트: 구체적인 적분이 필요하지 않고 차원해석만 사용할 수 있으면 답을 추측할 수 있다. 그리고 전기력에 대해서도 같은 질문을 할 수 있다.
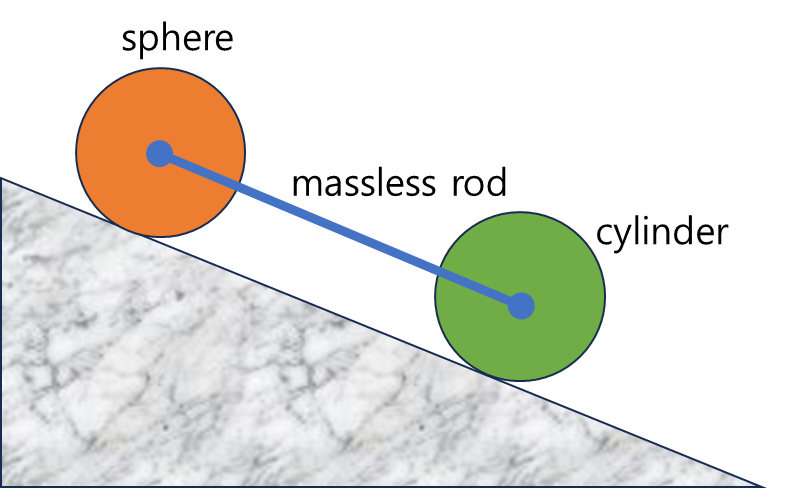
훌라후프에 같은 질량의 물체가 테두리에 붙어있다. 훌라후프를 땅에 굴릴 때 너무 빠르면 물체가 위로 올라갈 때 바닥에서 떨어질 수 있다. 훌라후프가 튀지 않고 구르려면 물체가 바닥에 있을 때 중심이 움직이는 속력 $v_0$은 얼마가 되어야 하는가? 단, 훌라후프는 미끄러짐 없이 구른다.
바퀴가 구르면 중심에 대해서 회전운동을 하므로 물체가 가장 위에 올라갈 때 수직항력이 가장 작아지므로 바닥에서 떨어진다면 이 지점에 왔을 때이다. 이때 질량중심의 속도를 $v$라면 바퀴의 회전 각속도는 $\omega=v/R$이다. 바퀴의 중심과 같이 움직이는 관성계에서 보면 바퀴와 물체는 $\omega$의 각속도로 순간 회전을 한다. 바퀴+물체의 질량중심은 바퀴 중심에서 $R/2$만큼 위에 있고, 역시 $\omega$의 각속도로 시계방향으로 순간 회전을 한다. 계에 작용하는 외력이 바닥의 수직항력($\uparrow$)과 바퀴+물체의 중력($\downarrow$) + 마찰력($\rightarrow$)인데, 수직항력과 중력이 질량중심의 원운동을 기술하는 구심력이 된다.
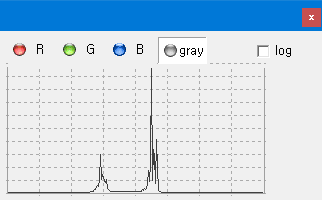
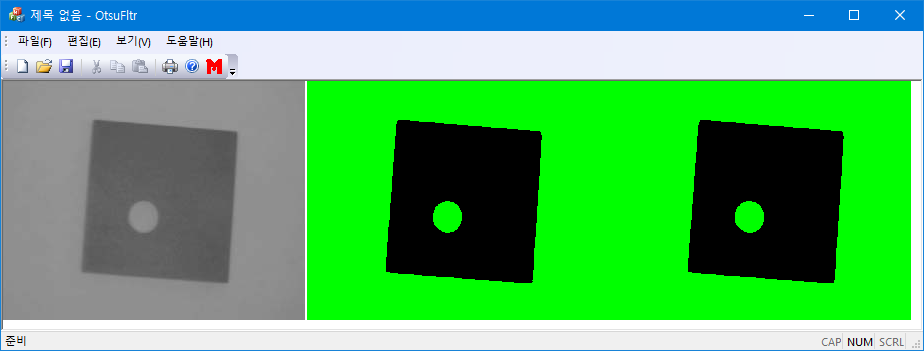
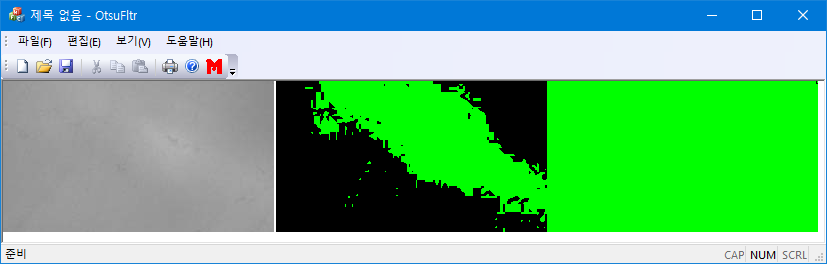
Otsu 이진화에서 threshold 값의 선택은 전경과 배경 사이의 분산을 최대로 하는 픽셀 값이다. 영상의 히스토그램이 bimodal인 경우는 잘 동작하지만, unimodal인 영상의 경우는 제대로 처리가 안된다. Valley emphasis 방법은 Otsu 방법을 사용하면서 histogram profile의 valley에 가중치를 더해주는 방식으로 threshold 값을 찾는다.